


Introduction
EV Powertrain Software Development for electric vehicles (EVs) is a complex process requiring careful preparation, ongoing testing, and quick iteration. Powertrain systems have several interconnected parts that must function flawlessly, such as control units, inverters, battery management systems, and electric motors. Ensuring that the control software connects with these components flawlessly while preserving efficiency, safety, and performance presents a problem.
Identifying bugs later might result in substantial cost increases, delays, and costly troubleshooting. To address these issues, a Model-Based Design (MBD) strategy in conjunction with cutting-edge technologies from top players in the market, such as Dorleco, can be extremely helpful in reducing time-to-market, maximizing resource utilization, and producing reliable, high-quality solutions.
The EV Powertrain Software Development Stages
It’s critical to comprehend the essential phases of EV powertrain software development before delving into the details of the MBD approach and how Dorleco tools support development.
1. Requirement gathering and analysis:
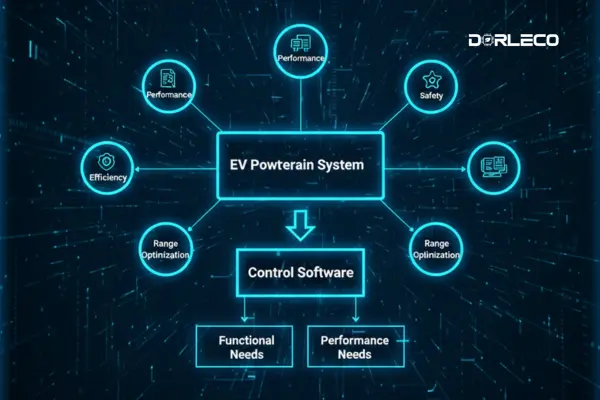
Development teams examine the functional and performance needs of the electric vehicle powertrain system at the outset of the process. At this point, it’s important to comprehend how the various parts of the powertrain will work together as well as how the control software will operate the entire system to meet objectives like performance, safety, efficiency, and range optimization.
2. Control Design and Architecture:
Creating the control system architecture comes next after defining the requirements. This involves defining the control logic and creating algorithms that can manage the intricacies of the powertrain, such as coordinating motor control and controlling energy flows. At this point, interactions with further parts, such as the battery and transmission systems, are also specified.
3. Model-Based Design:
Model-Based Design (MBD) is used in this situation. The powertrain system’s physical components are represented mathematically by MBD, which also simulates their interactions in a controlled setting. By taking this step, it is certain that design problems can be found and fixed early on, which lowers the expense of repairing them later.
4. Testing and Validation:
Model-in-the-loop (MIL) testing is the first step in the testing process. It involves simulating and testing the control logic inside a virtual model of the system. Once confirmed, the control logic is tested in a more thorough simulation that closely resembles the actual system during the Software-in-the-Loop (SIL) phase. During the last phase, known as Hardware-in-the-Loop (HIL) testing, the control logic is implemented on hardware in real-time, and the software’s ability to communicate with physical components is tested.
5. Hardware Prototyping and Deployment:
After the team uses the simulation to verify the control software, they use real hardware for testing. After they verify proper input/output responses through open-loop operation, they place the controller through a battery of tests to verify its real-world performance.
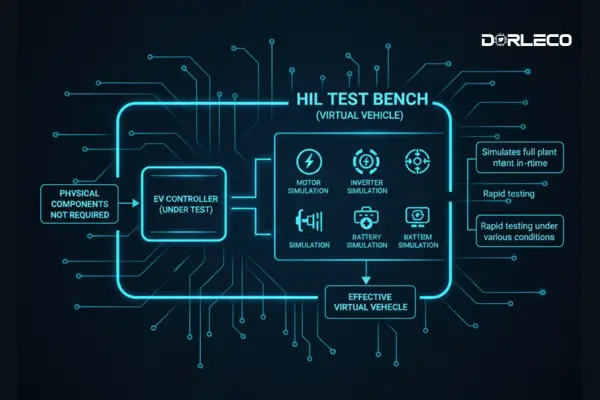
6. Testing Hardware-in-the-Loop (HIL):
During this phase, engineers can test the controller without requiring the physical components to be present because HIL testing simulates the full plant (motor, inverter, battery system, etc.) in real time. Rapid testing under a variety of conditions is made possible by the HIL test bench, which functions as an effective virtual vehicle.
Model-Based Design (MBD) and Its Benefits
1. EV Powertrain Software Development
2. Continuous Testing:
When using MBD, the team starts testing at the design phase and doesn’t stop until the project is finished. This reduces the amount of time needed for debugging and rework since they find errors and inconsistencies early.
3. Enhanced Collaboration:
Development teams can work on various system models concurrently, allowing them to exchange updates and share progress in real-time. This reduces the possibility of integration problems that developers generally encounter when they combine control software components.
4. Efficient Development:
Without the requirement for real prototypes, developers may simulate and test control software under a variety of scenarios by using models. This enables developers to evaluate edge cases early and optimize system performance before they release the hardware.
To handle the increasing complexity of EV Powertrain Software Development, where engineers must closely connect controllers with both mechanical and electrical systems, MBD’s continuous integration and testing environment is essential.
Advanced Tools for EV Powertrain Software Development
Advanced tools like Infineon, Vector, and Typhoon HIL can assist in further optimizing the development process. These technologies offer great fidelity and precision in the development of control software, and they facilitate hardware prototyping, testing, and validation.
1. AURIX™ TC3xx Automotive MCUs
The AURIX™ TC3xx microcontrollers (MCUs) from Infineon are made to withstand the severe demands of contemporary EV powertrain systems. The 32-bit TriCore™ processing architecture, upon which these MCUs are based, provides real-time performance, functional safety, and power efficiency. The AURIX™ TC3xx series supports numerous EV applications, such as motor control, battery management, and inverter management.
Hardware security and safety measures equip AURIX™ TC3xx MCUs to guarantee reliable and secure operation of the control software, even in demanding settings. The MCUs meet the strictest safety standards (ASIL-D) required for use in automotive applications.
2. The VX1000 System from Vector for ECU Calibration
The VX1000 system from Vector offers engineers a high-performance ECU measurement and calibration solution. The system facilitates quick and accurate data collection by connecting the ECU to measurement and calibration instruments. This enables engineers to guarantee that the software satisfies performance requirements and optimizes control algorithms.
Through a smooth integration with test benches and labs, the VX1000 system enables developers to measure ECUs in real-time driving scenarios. Additionally, it facilitates high transfer rates for quick data processing, which boosts the testing and calibration process’s effectiveness.
3. Highest Fidelity Ultra-HIL Testing
Thanks to its robust simulation capabilities, an extremely realistic hardware-in-the-loop (HIL) testing platform allows developers to test control software before building physical prototypes. Typhoon HIL allows for comprehensive testing under a variety of scenarios by simulating the behavior of real powertrain components (such as motors, inverters, and battery systems) in real-time.
HIL’s platform enables developers to create digital twins for simulating powertrain behavior in various scenarios and supports automated testing to ensure reliable control software releases.
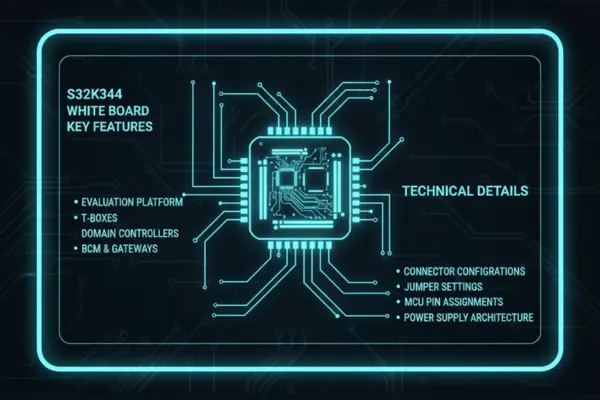
4. NXP S32K3XX Microcontrollers
Dorleco uses this microcontroller in their VCUs. It covers the S32K344 White Board’s key features for evaluating T-boxes, domain controllers, BCM, and gateways, along with connector details, jumper configurations, MCU pin assignments, and power supply architecture.
Conclusion
Creating EV powertrain control software is difficult and complex, requiring sophisticated tools, thorough testing, and careful planning. By implementing model-based design (MBD), developers may guarantee continuous testing, early error detection, and enhanced teamwork. The outcomes of this are better software, shorter development cycles, and lower costs.
Advanced tools like Vector and Dorleco HIL streamline EV powertrain software development by enabling efficient testing, validation, and prototyping while ensuring performance, safety, and reliability.