

Introduction
CAN Bus (Controller Area Network) is a serial communication protocol that lets devices like sensors, actuators, PLCs, and displays talk to each other on a shared two-wire network — without needing a central host computer. Originally built for cars, it became a staple in industrial automation because it handles noise, vibration, and real-time data demands exceptionally well. It supports up to 127 nodes, transfers data at up to 1 Mbit/s, and comes with built-in error detection that keeps things running even when individual components fail.
Table of Contents
- What Is CAN Bus?
- How CAN Bus Actually Works?
- Key Technical Specifications
- Why Industrial Automation Adopted CAN Bus?
- Where CAN Bus Is Used in Industry?
- Honest Pros & Cons
- CAN Bus vs. Other Industrial Protocols
- The Security Question
- Is CAN Bus Future-Proof?
- Frequently Asked Questions
1. What Is CAN Bus?

Consider what occurs on a busy production floor. Sensors that monitor temperature, actuators that move parts, a PLC that makes decisions, and an HMI screen that shows operators what’s happening all require continuous information sharing.
Before CAN Bus, each device had to run a separate wire to a central controller in order to connect all those components. messy, costly, and prone to failure. By enabling all devices to share a single two-wire network and communicate directly with one another via a broadcast system—more akin to a group chat than individual phone calls—CAN Bus overcame this issue.
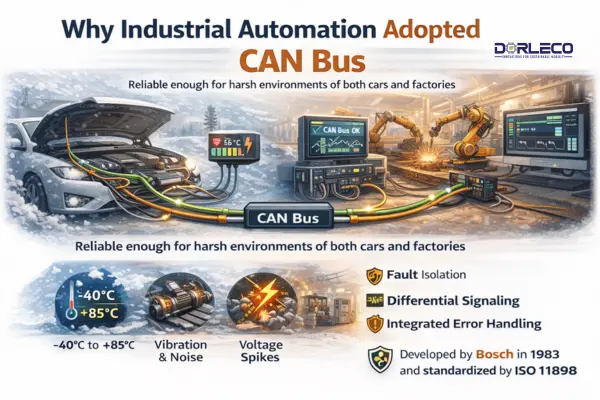
Bosch created the technology in 1983, and ISO 11898 was used to standardize it. It was initially employed in automobiles to lessen the weight of wiring harnesses, but engineers soon discovered that it was just as appropriate for industrial settings with comparable problems, such as electrical noise, vibration, high temperatures, and the requirement for millisecond-level reaction times.
Key idea: CAN Bus is a “multi-master” protocol, meaning that any node on the network can start a conversation. When two nodes attempt to communicate at the same time, built-in arbitration automatically settles the dispute. No node ever locks while awaiting authorization.
2. How CAN Bus Actually Works
Fundamentally, CAN Bus uses two wires known as CAN-High (CANH) and CAN-Low (CANL) for differential communication. The data transmitted is represented by the voltage differential between them. Because of its differential approach, CAN Bus is extremely resistant to electromagnetic interference. If noise affects both cables equally, the signal remains clean because the difference between them remains the same.
A CAN Bus broadcasts messages to every node at the same time. Each node “listens” to the bus and uses the message ID to determine whether a message is pertinent to it. This innovative architecture, which is message-based rather than address-based, allows you to add a new node to the network without having to reconfigure every current device to acknowledge it.
The CAN Bus protocol uses a procedure known as bitwise arbitration to handle attempts by two nodes to broadcast at precisely the same moment. The lower-priority node retreats and attempts again, while the node with the higher-priority message ID wins automatically. All of this transparently occurs in microseconds without causing any data loss.
Another noteworthy aspect is error detection. There are five distinct error-checking techniques in CAN Bus:
CRC evaluations
Frame checks
Verification of acknowledgement
Bit tracking
Checks for bit stuffing
When a node detects too many faults, it immediately enters a bus-off state to prevent a malfunctioning device from corrupting the rest of the network.
3. Key Technical Specifications at a Glance
| Parameter | Specification | Notes |
|---|---|---|
| Standard | ISO 11898-1 / ISO 11898-2 | High-speed CAN (data layer / physical layer) |
| Max Data Rate | 1 Mbit/s | At cable length ≤ 40 m; rate drops with longer runs |
| Max Bus Length | ~1,000 m | At 50 kbit/s; use repeaters for longer runs |
| Max Nodes | 127 nodes | Standard CAN; CAN FD extends this further |
| Topology | Linear / bus | Requires 120Ω termination resistors at both ends |
| Wiring | 2-wire differential (CANH / CANL) | Often twisted pair for additional noise immunity |
| Error Handling | 5 mechanisms | CRC, frame check, ACK, bit monitor, bit stuffing |
| Message Priority | Bitwise arbitration | Lower ID = higher priority; non-destructive |
| Power | Low-power sleep modes | Nodes can be woken selectively |
4. Why Industrial Automation Adopted CAN Bus
Numerous industrial communication protocols exist, including Modbus, PROFIBUS, EtherCAT, DeviceNet, and CANopen. Why, therefore, has CAN Bus been used in so many applications for such a long time?
The extreme cruelty of the settings for which it was intended is partly to blame. Car engines must continue to run in -40°C winters and +85°C engine bays, vibrate, get wet, and deal with voltage spikes from motors. The problem set of industrial machinery is nearly the same.
The fault isolation, robust differential signaling, and integrated error management that allowed CAN Bus to endure in automobiles transitioned nearly flawlessly to manufacturing floors.
5. Where CAN Bus Is Used in Industry:
Common applications include:
Robotics
The CAN bus coordinates robotic arms in real time—syncing joint encoders, servo drives, and force sensors so each axis moves exactly when it should.
Manufacturing Lines
Automated assembly lines use CAN Bus to synchronize conveyors, welders, inspection cameras, and PLCs.
Process Control
Chemical plants, refineries, and power generation facilities use CAN Bus to monitor temperature, pressure, and flow sensors.
Industrial Vehicles
Forklifts, cranes, mining equipment, and reach stackers use CAN Bus for:
load monitoring
drive control
safety interlocks
operator displays
Aerospace & Defense
Ground support equipment and test rigs rely on CAN Bus where vibration resistance and reliability are essential.
EV & Battery Systems
Battery Management Systems (BMS) and Vehicle Control Units (VCUs) rely on CAN Bus for the following:
cell monitoring
thermal management
powertrain coordination
Building Automation
HVAC systems and elevator controls use CANopen for distributed control.
EV Charging Infrastructure
For example, charging stations use CAN Bus internally between power electronics, controllers, and UI systems.
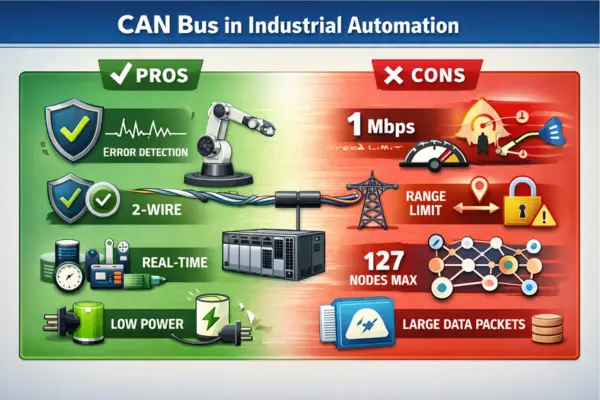
6. Honest Pros & Cons of CAN Bus in Industrial Automation
Strengths
Exceptional noise immunity (differential signaling)
Built-in, multi-layered error detection
Fault-tolerant network behavior
Real-time capable communication
Simple two-wire wiring
Huge hardware ecosystem
Easy scalability
Low power consumption
Decades of proven reliability
Limitations
Max 1 Mbit/s bandwidth
Distance vs speed tradeoff
No built-in security or encryption
Less deterministic than EtherCAT
Maximum 127 nodes per segment
Configuration complexity in large systems
Not ideal for large data packets
7. CAN Bus vs Other Industrial Protocols
| Feature | CAN Bus | RS-485/Modbus | PROFIBUS | EtherCAT |
|---|---|---|---|---|
| Max Speed | 1 Mbit/s | 10 Mbit/s | 12 Mbit/s | 100 Mbit/s |
| Real-Time | ✓ | ~ | ✓ | ✓✓ |
| Built-in Error Detection | ✓✓ | ✗ | ✓ | ✓ |
| Multi-Master | ✓ | ✗ | ~ | ✓ |
| Noise Immunity | ✓✓ | ✓ | ✓ | ~ |
| Wiring Complexity | Low (2-wire) | Low | Medium | Medium–High |
| Cost | Low | Very Low | Medium | Medium–High |
| Security | None built-in | None | Limited | Limited |
| Best For | Machines, robotics, vehicles | Simple serial links | Process automation | Motion control |
8. The Security Question
CAN Bus was designed in the early 1980s before cybersecurity became a major concern.
It has:
No authentication
No encryption
No built-in message verification
In principle, any device on the bus can transmit messages.
Common mitigation strategies include:
network segmentation
CAN-to-Ethernet gateways
intrusion detection systems
CANopen Security extensions
New standards like CAN FD, CAN XL, and CAN-SEC are being developed to address these concerns.
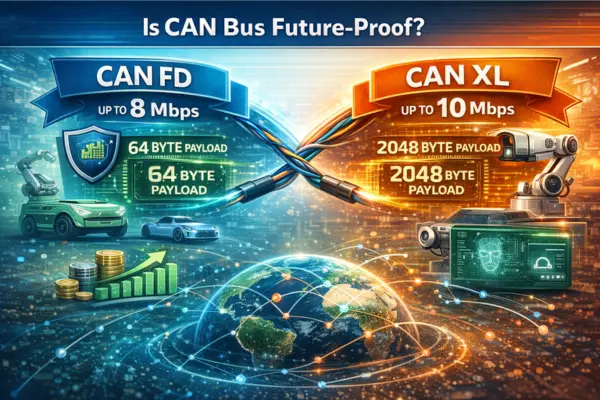
9. Is CAN Bus Future-Proof?
The honest answer: yes, with nuance.
Classic CAN (1 Mbit/s) works well for many applications; however, it may not be sufficient for future AI-driven robotics or machine vision systems.
However:
CAN FD
up to 8 Mbit/s
64-byte payloads
CAN XL
up to 10 Mbit/s
2048-byte payloads
These new versions extend CAN’s capabilities while maintaining backward compatibility.
Moreover, billions of CAN nodes are already deployed globally; therefore, the protocol will remain a practical, cost-effective solution for many industrial systems for decades.
Conclusion
CAN Bus has proven itself as one of the most reliable and practical communication protocols in industrial automation. From factory robotics and process control systems to industrial vehicles and EV infrastructure, its ability to deliver real-time communication, strong noise immunity, and robust fault handling makes it a trusted choice for engineers. Even after decades of use, CAN continues to evolve through technologies like CAN FD and CAN XL, ensuring it remains relevant for modern, data-driven machines and connected systems.
While newer industrial Ethernet protocols offer higher bandwidth, CAN Bus still provides the ideal balance of simplicity, reliability, and cost-efficiency for many machine-level networks. For applications where dependable communication between controllers, sensors, actuators, and HMIs is critical, CAN remains a proven and widely adopted solution.
At Dorleco (Dorle Controls), CAN Bus forms the backbone of many of our intelligent control solutions. We design and supply Vehicle Control Units (VCUs), CAN displays, and CAN keypads that integrate seamlessly into CAN-based architectures for electric vehicles, off-highway machinery, and industrial systems. Along with hardware, our team also provides EV software development and vehicle communication engineering services, helping OEMs build scalable and reliable control systems from prototype to production.
As industrial machines and vehicles become increasingly connected and software-driven, robust communication networks are becoming more important. As a result, CAN bus will continue to play a key role in this evolution.