

Overview
In the quickly evolving field of automotive technology, it is essential that different vehicle systems communicate with one another seamlessly. Many Electronic Control Units (ECUs) make up modern cars, and each one is in charge of different tasks like entertainment, safety systems, braking, and engine control. Error Detection In CAN protocol is essential to making sure that these parts work in unison.
A strong, dependable, and real-time serial communication system, CAN was created especially for the automotive industry. Even yet, communication faults might still happen as a result of internal component failure or outside interference. Reliability, efficiency, and safety in vehicle operations depend on Error Detection In CAN and correction systems.
By discussing important Error Detection In CAN methods, corrective tactics, fault management systems, and the future of error handling in automotive networks, this article examines how CAN guarantees error-free communication.
CAN’s Role in Modern Automobiles

CAN: What is it?
Robert Bosch GmbH created the serial communication protocol known as the Controller Area Network (CAN) in the 1980s. It makes it possible for ECUs to speak to one another without a host computer. All nodes receive messages sent to them via the broadcast transmission mode used by CAN, and each node determines if the message is relevant.
CAN’s significance in automotive systems
- The foundation of automotive communication systems is CAN. Among its primary benefits are:
- Real-time communication for applications that depend on safety.
- Reduced complexity of the wiring, which reduces the car’s weight and price.
- Outstanding noise resistance, suitable for usage in car environments.
- Both passenger and commercial vehicles benefit from its scalability and dependability.
To ensure coordinated functioning, for instance, CAN enables communication between the anti-lock braking system (ABS) and the stability and traction control systems.
Understanding the Vulnerabilities in CAN
CAN is a reliable protocol, however it is not error-proof. Common causes of problems in communication include:
- Alternators, ignition systems, and other electronic components can produce electromagnetic interference (EMI), which can tamper with data on the CAN bus.
- Hardware malfunctions can cause data corruption or signal loss. These problems can arise with transceivers, cables, connectors, or ECUs.
- Electrical malfunctions and electromagnetic compatibility (EMC) issues: Inadequate EMC between various car subsystems can result in either temporary or permanent malfunctions.
- CAN has built-in error detection and repair systems to guarantee data integrity in light of these difficulties.

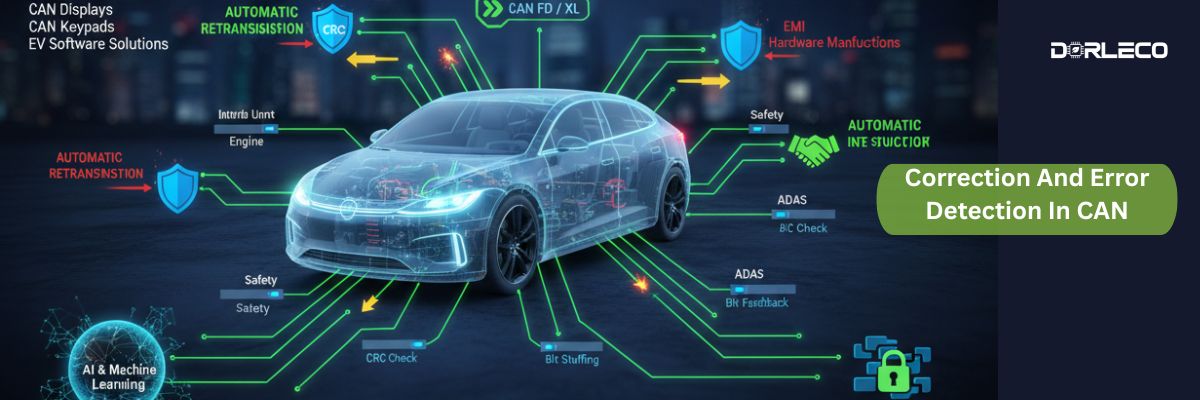
Error Detection In CAN Techniques
The CAN protocol incorporates a number of techniques to identify message transmission problems in order to preserve reliability:
1. Check for Cyclic Redundancy (CRC)
A mathematical algorithm known as a CRC creates a checksum from the contents of a communication. The sender includes this checksum in the message. The recipient recalculates the CRC after receiving the message and contrasts it with the one that was included:
- The message is probably still intact if they match.
- If not, the message gets rejected and an error is noted.
2. Bit Stuffing
Bit stuffing is used by CAN to ensure synchronization. Five consecutive identical bits are immediately followed by an opposing bit. Clock synchronization is maintained in this way. The receiver flags a bit stuffing error if it finds a breach of this rule.
3. Acknowledgment (ACK) Error
In CAN, at least one node must acknowledge each frame. The sender deems the message failed and initiates a resend if no node sets the ACK bit.
4.Form and Bit Errors Form Error:
- When fixed-format fields (such as CRC or ACK delimiters) are not formatted correctly, a form error occurs.
- A bus conflict is indicated by a bit error, which occurs when a node sends a dominant bit but detects a recessive bit (or vice versa).
Error Detection In CAN Mechanisms
To guarantee that communication continues, errors must be fixed as soon as they are discovered. CAN uses a number of corrective methods:
1. Retransmission automatically
When an error is found, the sender automatically retransmits the message and discards the flawed one. Without the need for manual intervention, this procedure guarantees a successful delivery in the end.
2. Feedback Based on ACK
If a message is received correctly, the receiving node transmits an ACK bit. If the sender does not detect this acknowledgment, it assumes the transmission failed and retransmits the frame. The successful reception is confirmed by this process.
Error Detection In CAN Management and Recovery
To isolate errors and preserve system functionality, CAN has advanced error management tools.
1. Fault Confinement and Error Counters
Two error counters are kept up to date by every CAN node:
- Error Counter Transmit (TEC)
- Error Counter Received (REC)
- When people make mistakes, these counters rise, and when they communicate successfully, they decline.
- A node functions in one of three modes depending on the error count:
- Error Active Mode: Node actively engages in bus communication; normal operation.
- Error Passive Mode: To prevent more interruptions, the node lowers its involvement after detecting problems.
- Bus Off Mode: To avoid complete bus failure, the node disconnects from the network after exceeding a critical error threshold.
2. Error Flags
When they identify problems, CAN nodes send out particular flags:
- Error Flag Active
- Flag for Passive Errors
- Error Delimiter
- The Overload Frame
These flags assist in preserving synchronization and data consistency by informing all nodes on the bus about errors.
Advanced Error Management Techniques
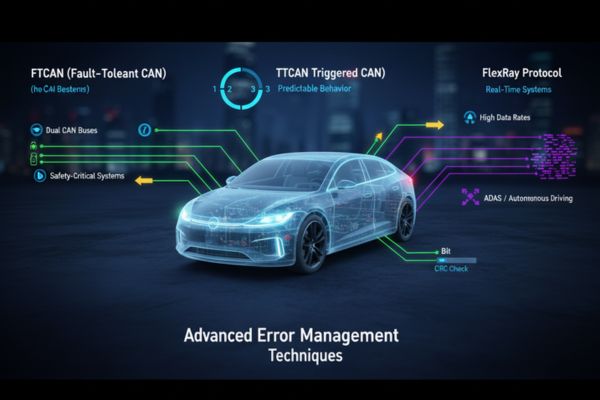
The car industry has created additional protocols and architectures to improve fault tolerance and reliability even more:
1. FTCAN, or fault-tolerant CAN
By using multiple communication pathways, like dual CAN buses, FTCAN makes sure that operations continue even in the event that one path fails. Steer-by-wire and brake-by-wire systems are two examples of safety-critical applications where this is very helpful.
2. TTCAN, or time-triggered CAN
By introducing time slots for every message, TTCAN improves predictability and decreases collisions, which are crucial for real-time systems.
3. The FlexRay Protocol
FlexRay provides better fault tolerance, predictable behavior, and greater data speeds despite not being a component of the conventional CAN protocol. Autonomous driving platforms and advanced driver assistance systems (ADAS) frequently employ it.
Implications of Error Detection In CAN for Security
As linked and driverless cars proliferate, security has emerged as a key issue. CAN is susceptible to attacks since developers did not initially create it with cybersecurity in mind.
1. Mitigation of Cyber Threats
Attackers can insert malicious messages by taking advantage of errors. However, strong error detection systems aid in the early detection of such irregularities, thereby avoiding illegal control.
2. Intrusion Detection Systems (IDS)
Contemporary IDS solutions continuously monitor CAN traffic. Their use of AI and pattern recognition makes proactive protection possible to spot anomalous activities, such as replay attacks or message flooding.
CAN Error Detection and Correction’s Future
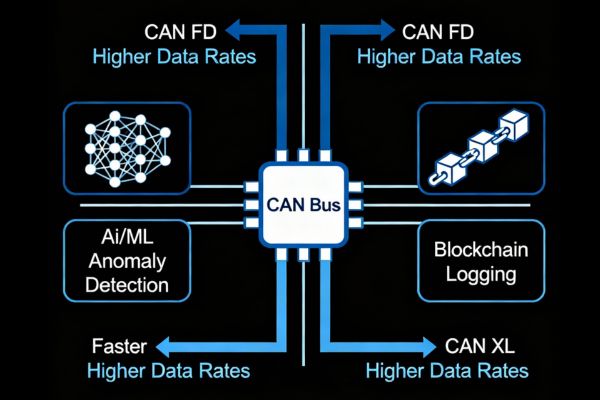
The communication needs of the automobile industry are changing quickly along with it. The following significant developments will influence CAN error management going forward:
1. Machine learning and artificial intelligence
Systems with AI capabilities can examine CAN data to find minute fault patterns that conventional techniques might overlook. ML algorithms become more accurate and produce fewer false positives as they gain the ability to discriminate between innocuous noise and actual threats.
2. Integration of Blockchain
Researchers are investigating blockchain technology for CAN message immutable logging. This aids in the creation of tamper-proof communication records that are beneficial for forensic investigations, security audits, and compliance.
3. CAN Protocols of the Next Generation
Advancements like CAN FD (Flexible Data-Rate) and CAN XL ensure the viability of CAN for sophisticated modern cars by offering larger data payloads, faster transmission, and improved error management.
Enhancing Automotive Communication with Dorleco
We at Dorleco are leading the way in innovative automobile control and communication. With our headquarters located in Farmington Hills, Michigan, and branches in Canada, Germany, and India, we are experts in:
VCUs, or advanced vehicle control units
User-Centered CAN Displays
Sturdy and Adaptable CAN Keypads
Cutting-Edge EV Software Solutions
EV Software Solutions of the Future
We have been assisting OEMs and Tier-1 suppliers in achieving smooth, safe, and high-performing communication in their automobiles since our foundation in 2019. Whether you want to integrate state-of-the-art control units or improve your EV systems, Dorleco offers unparalleled quality and engineering know-how.
Conclusion
For automotive systems to be safe, effective, and intelligent, Error Detection In CAN and correction in CAN networks. are essential. Reliable in-vehicle communication is becoming increasingly important as cars become more software-driven, linked, and autonomous.
To make tomorrow’s cars not only smarter but also safer, we at Dorleco dedicate ourselves to pushing the limits of what is feasible in automotive control systems.