

1. Introduction to Can 2.0 and Can Fd
Bosch developed the Controller Area Network (CAN) protocol in the 1980s, revolutionizing data exchange between multiple ECUs in both automotive and industrial applications. It allows nodes, such as ECUs, sensors, and actuators, to interact via a single twisted-pair bus and was first standardized as CAN 2.0 then CAN FD. It was perfect for real-time safety-critical activities because of its robustness, fault detection, and deterministic message priority.
2. Traditional CAN: The Current Situation

2.1 Constant Data Rate
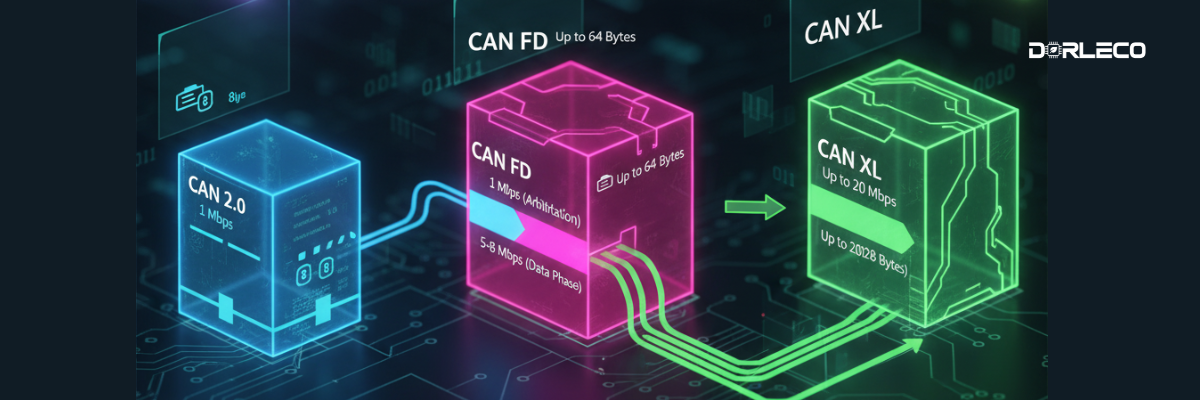
Runs at a maximum speed of 1 Mbps, however long buses frequently operate at 500 kbps or less.
Each frame has a consistent bit-rate, which restricts bandwidth.
2.2 Length of Message
Eight bytes per frame was the payload limit; this was acceptable in the 1980s but not enough for contemporary applications.
2.3 Priority & Identifier Supports 29-bit (Extended) and 11-bit (Standard) IDs:
Extended IDs (CAN 2.0B) permit more node types but have slightly slower performance; shorter IDs provide faster arbitration but fewer unique identifiers.
2.4 Determinism & Reliability
Deterministic transmission is ensured by hardware-based arbitration, which gives priority to important signals.
Bit-stuffing, self-monitoring, and CRC provide robust error detection, which makes CAN incredibly dependable for safety-critical systems.
3. The Reason CAN FD Is Revolutionary

The traditional CAN architecture became constrained by the growing data requirements in ADAS, EVs, industrial automation, and over-the-air (OTA) software upgrades. A compelling case for improvements was made by these changing needs.
In 2012, Bosch created CAN FD (Flexible Data Rate), which was standardized by ISO 11898-1:2015.While maintaining the benefits of CAN 2.0, this “second-generation CAN” significantly increases speed and payload.
4. CAN FD: Essential Characteristics & Benefits
4.1 Dual-Phase Bit Rate
The data segment changes to up to 5–8 Mbps, depending on the transceiver, while the arbitration phase stays at 1 Mbps (ensures compatibility).
This hybrid rate maximizes throughput and reliability.
4.2 Extended Payload
Reduces overhead and increases efficiency in high-volume data applications by supporting up to 64 bytes per frame.
4.3 Improved Error Identification
Enhances the detection of bit-level mistakes, particularly with larger payloads, by using a 17-bit or 21-bit CRC.
maintains robust fault confinement strategies (Error Active/Passive, Bus Off).
4.4 Compatibility with Backward
To prevent bus problems, FD frames contain a unique indication bit that CAN 2.0 nodes can identify and disregard.
As long as FD nodes have the ability to switch the arbitration rate to 1 Mbps when needed, mixed networks are feasible and can operate Can 2.0 and Fd frames.
5. Physical and Technical Aspects
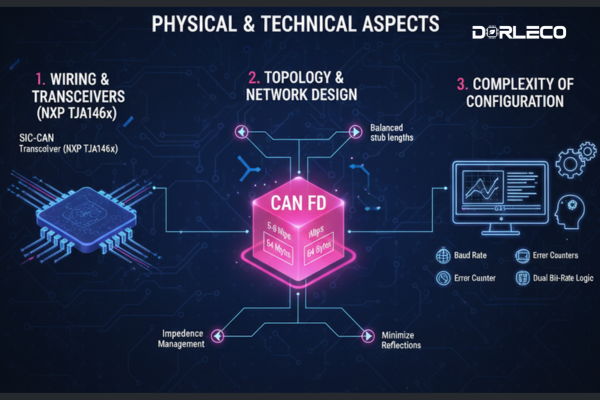
5.1 Wiring & Transceivers
Higher bit rates (5–8 Mbps) require sophisticated SIC-CAN transceivers, like NXP’s TJA146x series, tighter capacitance budgets, and high-quality cabling.
5.2 Topology & Network Design
FD is more prone to noise and signal reflections; impedance management, balanced stub lengths, and appropriate terminating are essential.
5.3 Complexity of Configuration
FD calls for more meticulous network planning, including arbitration vs. data thresholds, baud rate settings, error counters, etc., because of dual bit-rate logic and longer frames. Updated tools and the assistance of a skilled engineer are required.
6. Market Trends & Adoption by Industry
6.1 Automobile
Because of its high-bandwidth capabilities, FD is essential to contemporary ADAS, battery management, and ECUs for cameras, radars, and LiDARs.
Automobile manufacturers like as Daimler and GM use semiconductors from Infineon, NXP, TI, and STMicroelectronics extensively.
By 2024, traditional CAN still made up about 45% of automotive communication, while FD’s market share is growing and approaching CAN XL adoption.
6.2 Heavy-Duty and Industrial Vehicles
FD maintains legacy compatibility while enabling better diagnostics and control in J1939 truck and off-road systems without switching to Ethernet.
Longer term, Ethernet will take over, although FD bridges the bandwidth-cost-performance gap.
6.3 Defense, Aerospace, Medical, and Robotics
In sensor-rich situations such as drones, medical robotics, underground drilling, and avionics systems, extended payload and data rates are beneficial.
6.4 Market expansion
FD and CAN XL usage are expected to propel the CAN market’s growth from USD 5.2 billion in 2023 to USD 8.28 billion in 2024 at a about 11% CAGR.
7. Making the switch to CAN FD from CAN 2.0
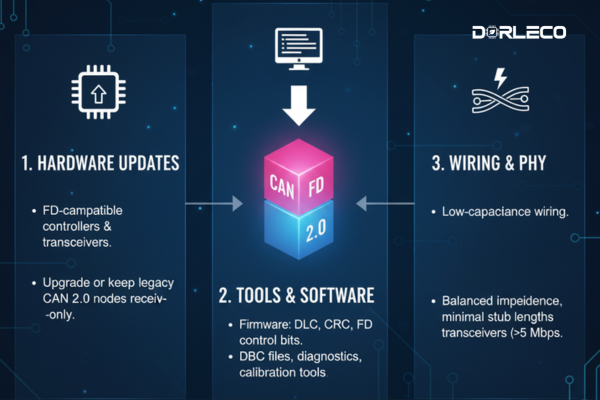
7.1 Updates to Hardware
For high-phase rates, all ECUs on FD segments require controllers and transceivers that are compatible with CAN FD.
It is possible to keep legacy CAN 2.0 nodes, but they must remain receive-only and arbitrated at 1 Mbps unless they are upgraded.
7.2 Tools & Software
Firmware must allow greater DLC options, checking CRC logic, and FD control bits (FDF, BRS).
Updates are necessary for FDF frames and greater payloads in DBC files, diagnostic tools, and calibration software.
7.3 Wiring & PHY
Review the bus architecture by using low-capacitance components, ensuring balanced characteristic impedance, and minimizing stub lengths.
Purchase higher-quality transceivers (SIC-CAN, for example) to accommodate >5 Mbps in practical configurations.
8. CAN FD vs Other Options
Higher speeds (100 Mbps+) are possible with automotive Ethernet (100BASE-T1), but it is more expensive and requires additional stacks (TCP/IP, AVB, and TSN).
Ethernet manages bulk data, while FD finds a balance between being straightforward, reliable, and economical for real-time ECUs.
9. Toward the Future: CAN XL

Growing network demands (CiA 610-1, up to 20 Mbps, realistic 2,048 byte payload) are driving changes in CAN XL.
It provides a clear upgrade route for upcoming networks while maintaining backward compatibility with Can 2.0 and Fd and traditional CAN.
FD will continue to be a crucial transitional technology, with early implementations anticipated in the upcoming years.
10. Summary Table
| Feature | CAN 2.0 | CAN FD |
|---|---|---|
| Max Data Rate | 1 Mbps | 5–8 Mbps (data phase) |
| Payload Size | 8 bytes | Up to 64 bytes |
| Arbitration Rate | 1 Mbps | 1 Mbps |
| CRC Check | 15‑bit CRC | 17‑bit/21‑bit CRC |
| Compatibility | N/A | Backward-compatible via FDF flag |
| Applications | Legacy vehicles, simple ECUs | ADAS, BMS, robotics, industrial systems |
| Hardware Needs | Standard CAN PHY | FD-capable PHY, low-capacitance wiring, SIC transceivers |
11. Conclusion Remarks
CAN FD retains the simplicity and reliability that CAN is known for, while overcoming three major limitations of CAN 2.0: limited bandwidth, small payload capacity, and reduced error resilience. Its hybrid dual-rate design complements old infrastructure and provides an affordable upgrade for today’s sophisticated sensor suites, OTA-enabled systems, and ECUs.
Deployment still needs to be planned carefully; improvements in hardware, accurate wiring, tool support, and skilled engineering are essential. However, FD is undoubtedly the de facto standard for automotive and industrial bus systems in the foreseeable future—until CAN XL becomes widely used—given market adoption, OEM impetus, and expanding support.
Investigate Further
Explore CAN 2.0 vs. FD design in greater detail by reading the Kvaser blog post “Comparing CAN FD with Classical CAN.”
Discover how to integrate IDS into CAN devices and use other cutting-edge security solutions like SecCAN.
Call to Action
If you’re exploring VCU services or products, or need CAN FD capacitive CAN keypads and CAN displays, check out Dorleco’s website or email info@dorleco.com—we offer tailored solutions to seamlessly modernize your vehicle communications.
This updated blog incorporates the latest specs, real-world adoption trends through 2025, and an outlook toward CAN XL—all while aligning with your structure and messaging. If you would like additional modification, code snippets, or further customization, do let me know!