


Introduction
CAN (Controller Area Network) is a standard communication protocol that allows electronic control units (ECUs) and devices connected to a network to exchange data in real time. In the industrial and automotive sectors, CAN is widely used. Since its initial development by Bosch in the 1980s, it has developed into a crucial component of modern cars and industrial automation systems.
The fundamental elements of the CAN protocol, the data frame, and the CAN message format define the structure and transmission of data over the network. Let’s investigate these concepts in more detail:
CAN Message Format:
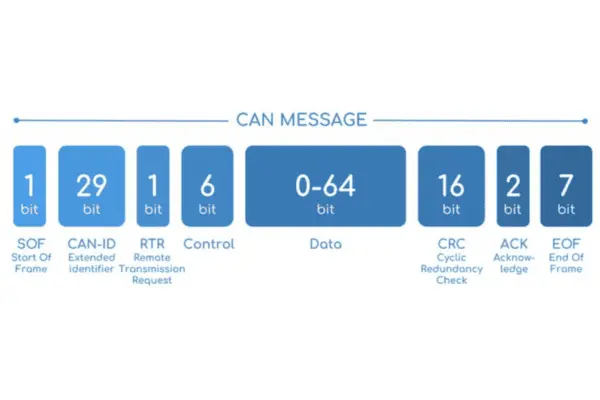
In a CAN network, nodes exchange data packets called CAN messages. These signals are necessary to enable communication between various electrical components in vehicles, industrial systems, and machinery. The CAN message format is composed of several important elements:
- Communication ID (identity): Each CAN communication is assigned a unique identity to allow network nodes to differentiate between different message types. Standard CAN 2.0A uses 11-bit identities, whereas Extended CAN 2.0B uses 29-bit identifiers. The value of the identifier determines the communication’s priority on the network. The data length of the message frame is shown in the Data Length Code (DLC) field. It can transmit a wide variety of data types because its range is 0 to 8.
- Data Frames for CAN: The two primary categories of CAN messages are data frames and remote frames. Since data frames are the primary data transmission mechanism on the network, we will focus on them here. To transfer actual data between nodes, the most common CAN message type is the CAN Data Frame. It consists of the previously stated components, including the data field, DLC, message ID, and CRC checksum. Because data frames enable ECUs to exchange critical information such as engine sensor data, brake status, and transmission commands, they are vital to industrial automation and vehicle control systems.
Benefits
Particularly in the automotive and industrial industries, data frames and the CAN (Controller Area Network) message format offer several benefits over alternative communication techniques. The following are a few of the primary advantages:
- Real-Time Communication: By facilitating quick and predictable data flow between network nodes, CAN facilitates real-time communication. This is crucial for applications that need accurate timing, such as engine control in cars or robotic automation in manufacturing.
- Reliability: The integrity of transmitted data is preserved by CAN’s robust error-checking technique, cyclic redundancy checks (CRC). Because the protocol allows for automated retransmission in the event of an error, data corruption is less likely.
- Deterministic Behavior: One of CAN’s features is priority-based arbitration. The network prioritizes messages with higher priority identifiers, resulting in the quick transport of critical data. This predictable behavior is necessary for
safety-critical systems. - Efficiency: CAN is very efficient at using available bandwidth. It is suitable for networks with many nodes and high throughput requirements, as it maximizes bandwidth utilization while minimizing overhead.
- Scalability: CAN networks are easily scalable by adding or removing nodes without requiring significant modifications to the network architecture. In applications where the network must adjust to changing demand, this adaptability is quite useful.
- Low Cost: CAN hardware components are an excellent choice for both small- and large-scale applications because of their cost-effectiveness. Its accessibility has contributed to its widespread popularity.
- Fault Tolerance:
Engineers design CAN to operate in noisy environments, such as those seen in industrial and automotive settings.For dependable operation, it must be able to control electromagnetic interference (EMI) and electrical noise. - Support for a Range of Message Types: CAN can handle a range of message types, such as data frames for actual data transfer and remote frames for data requests from other nodes. This flexibility opens up new opportunities for communication.
- Standardization: Devices from different manufacturers can interact with one another without interruption as long as they adhere to the internationally established CAN protocol (ISO 11898). This reduces integration challenges and facilitates interoperability.
- Widespread Adoption: Industries widely utilize CAN as one of the most important communication protocols in the automotive and industrial sectors. The vast ecosystem of components and instruments generated by this widespread usage has made dealing with CAN easier for developers.

Disadvantages of CAN Message Format and Data Frames
Although the Controller Area Network (CAN) message structure and data frames offer numerous advantages, they also have some disadvantages. Understanding these restrictions is essential, particularly when considering the use of CAN for specific applications. The following are a few disadvantages of CAN:
- Restricted Bandwidth: The maximum data rate of CAN is lower than that of some other communication protocols. Although suitable for various applications, it might not be the ideal option for high-bandwidth data transfer, such as streaming videos.
- Restricted to Wired Networks by Deterministic Behavior: Wired networks are the ideal environment for CAN’s deterministic behavior to function. Unpredictable signal propagation lengths in wireless solutions may make deterministic behavior challenging to achieve.
- Restricted Message Length: For CAN data frames, the maximum payload length is 8 bytes (64 bits). This limitation can be burdensome when a single message needs to convey a large amount of data. Although priority-based arbitration in CAN is advantageous, its complexity can make it difficult to administer in big networks with lots of nodes. Careful planning and preparation are necessary for effective priority management.
- Variability in latency: Although CAN provides deterministic behavior, latency is still present. Two factors that could influence latency are message priority and network load, which could not be acceptable for some critical applications.
- Restricted Network Size: CAN networks sometimes have a constrained network size due to electrical considerations. As we add more nodes, we can find it challenging to control the network’s overall electrical load and signal reflections without additional protections like repeaters.
- Limited Fault Detection: CAN has error-checking processes in place, but some fault types—like intermittent defects caused by hard-to-diagnose wiring issues—may still go unnoticed.
- Absence of Built-In Security: CAN was designed to be used exclusively in closed, trustworthy networks. The lack of integrated security features in modern automobile applications might be troublesome, as security is becoming increasingly important.
- Complicated Debugging: Troubleshooting and debugging CAN networks can be challenging in large, complex systems. Determining the underlying cause of communication issues could require specialized tools and training.
- Limited Flexibility for Non-Standard Data: CAN’s organization is strong, and developers designed it for common data patterns. Unusual or erratic data formats may reduce transmission efficiency and need additional encoding.
Conclusion
In summary, data frames and the CAN (Controller Area Network) message format are essential parts of a communication protocol that have been crucial to the industrial and automotive sectors.
In the end, the relevant team should make the decision to employ data frames and the CAN message format after carefully analyzing the needs and limitations of the particular application. CAN is still a popular and dependable communication protocol when used properly; it forms the foundation of vital systems across many different sectors.
Explore more about the CAN message format and varieties of CAN displays & CAN Keypads here. For more information, contact us at info@dorleco.com