


Introduction to Driver-Assist Features
There has been a lot of discussion about completely autonomous vehicles, but it’s crucial to realize that this is a gradual process. A five-level framework has been established by the Society of Automotive Engineers (SAE) to define the automation level of every given vehicle. Driver-assist features that automate the choices a driver must make in specific situations need to be created and then incorporated into a unified software stack to achieve a fully autonomous, level-5 vehicle.
Creating features that take care of specific duties and merging them can help development teams go from a Level-1 or Level-2 configuration to a Level-3 vehicle.
We’ll examine a few characteristics of level-1 or level-2 autonomous cars in this blog post. This blog post covers the Advanced Driver-Assist Features and divides them into two categories: passive safety measures, which just alert the driver of an impending obstruction or collision, and active safety features, which actively interact with the driver to reduce the likelihood of an accident.
1. Lane Keeping Assist:
Many traffic accidents are brought on by negligence. Driving the same route for hours on end might make the activity less thrilling, which makes the driver more likely to nod off and go to sleep. This could lead the car to stray into another lane, putting the occupants and drivers of nearby cars in danger. The Lane Keeping Assist feature intends to avoid this type of incident. The system consists of a computer that determines if the car will leave the lane and visual sensors (cameras) that track lane lines.
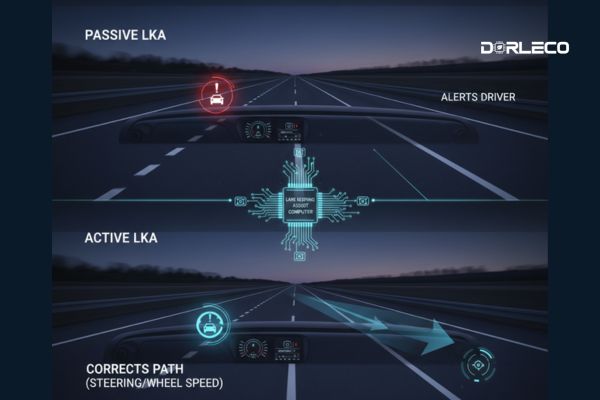
Level-1 autonomous vehicles frequently use lane-keeping assist systems since they must detect when the vehicle strays from its lane. Experts generally divide LKA systems into two main categories: active LKA and passive LKA.
A passive LKA merely alerts the driver that the car is about to change lanes; it does not interfere with the vehicle’s functions. Conversely, an active LKA will also try to correct the vehicle’s detour from the desired path. This adjustment may involve steering or altering a front wheel’s speed, causing a slight drift.
2. Lane-Change Assistance

Lane Change Assist activates with turn signals, often paired with blind-spot detection to reveal hidden obstacles. When a vehicle approaches the host vehicle in the target lane, the LCA system typically detects it using cameras and radar sensors. The system determines whether it is safe to do the lane-changing maneuver based on its estimation of the speed of the vehicle approaching. The driver will receive a warning if the oncoming vehicle’s speed is too high.
In general, poor driving situations like bad weather, night driving, or heavy fog benefit from lane change assistance. In such conditions, LCA can improve awareness and reduce accident risk.
The Adaptive Cruise Control system
One function that is present in many contemporary cars is cruise control. When engaged, the system keeps the vehicle moving at a steady pace, even if the driver depresses the accelerator. Pressing the brake or clutch pedal deactivates the cruise control if a slower vehicle is ahead. Automakers have updated the cruise control feature in their vehicles due to the recent introduction of high-performance sensors.
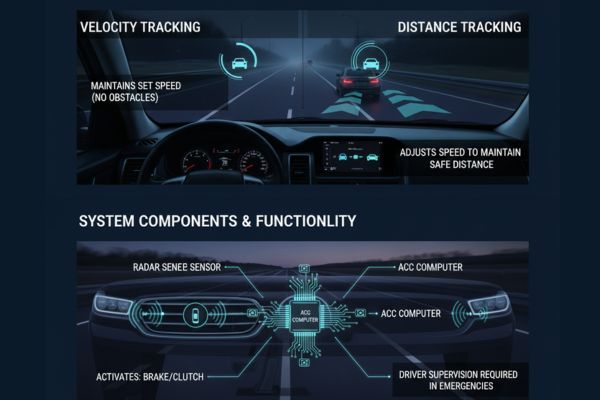
It now detects the separation between the host car and the vehicle in front. Adaptive cruise control (ACC) has two ways to engage the throttle pedal: velocity tracking and distance tracking. The system switches modes when the gap to the vehicle ahead falls below a threshold, entering distance tracking mode.
When in distance monitoring mode, the car adjusts its speed to stay a safe distance behind the front vehicle. ACC maintains the set speed if no obstacles are within range.
ith ACC on, the system adjusts speed, requiring driver control only in emergencies.
Developing ADAS Features at Dorleco
Register for our training programs to explore the technical aspects of driver-assist features, including modeling and simulation. Join a live online session or take an online course to master autonomous system development.
For more information on how our experience developing ADAS features can help you, send an email to info@dorleco.com