
INTRODUCTION
Communication protocols are essential for establishing connections between devices and for effective data interchange in industrial and automation applications. The Recommended Standard 485 (RS485) and the Controller Area Network (CAN) are two of the most widely used protocols in this industry. With the help of the straightforward chart below, you can rapidly learn how CAN Bus VS RS 485 vary from one another.
We will examine the distinctions between these two techniques as well as their benefits and drawbacks in this post.
What CAN Protocol be?
Robert Bosch GmbH created the CAN protocol for use in automotive applications in the 1980s. It has since gained widespread acceptance in other industries as well. Since CAN is a bus-based protocol, a single communication line can be used to facilitate communication between numerous devices. High dependability, fault tolerance, and real-time communication capabilities are well-known attributes of CAN.
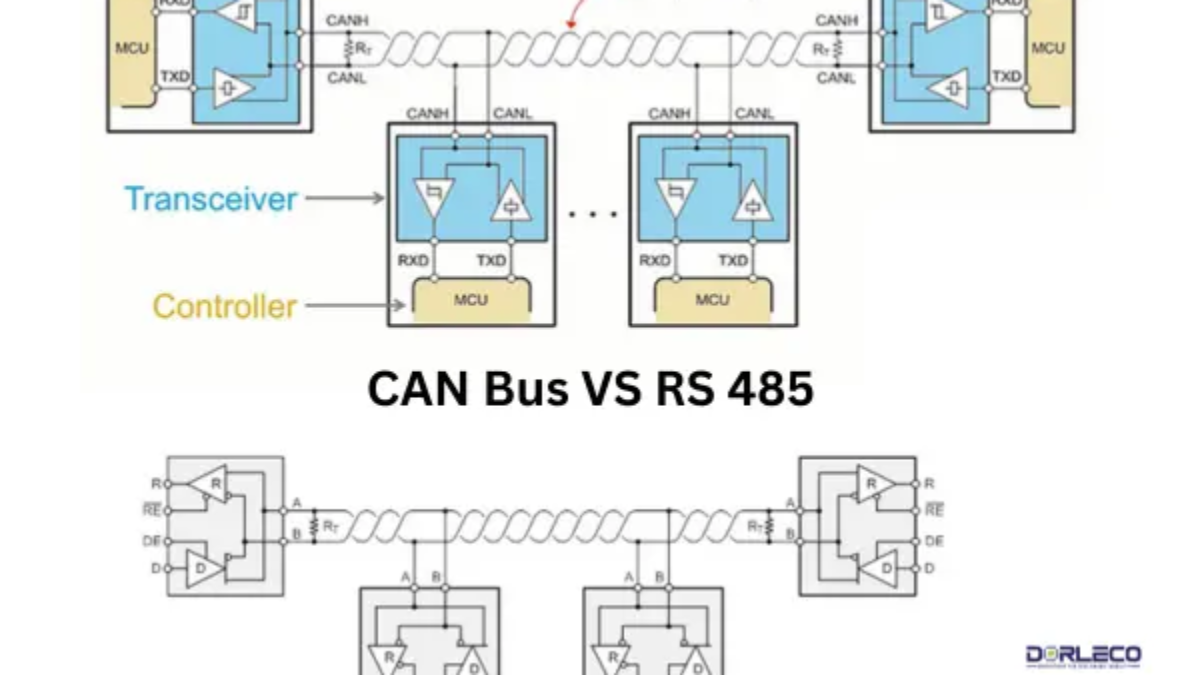
With a CAN high (CANH) line and a CAN low (CANL) line, the CAN protocol runs on a two-wire bus. It makes use of a message-based communication technique in which every message is sent along with a special identification that enables the recipient to recognize it and determine its priority. To avoid data collisions and guarantee effective use of the communication line, CAN also employs a collision detection and arbitration mechanism to guarantee that only one device transmits data at a time. CAN can function in -40°C to +85°C temperatures and is made for severe settings.
Benefits of the CAN bus:
- Fast Speed and Bandwidth: The CAN bus is perfect for real-time communication between several devices since it can transfer data at a fast rate of up to 1 Mbps.
- Multiple devices can send and receive data on the same communication line thanks to CAN bus support for multi-master/multi-slave communication, which facilitates effective communication between devices.
- Fault Tolerance: The high fault tolerance of the CAN bus is a result of its error detection and correction capabilities, which provide dependable data transfer even in noisy surroundings.
- Robustness: The CAN bus can function in temperatures between -40°C and +85°C because it is made for severe settings.
- Scalability: The CAN bus is flexible and adaptive to changing requirements since it can be readily scaled up or down based on the size and complexity of the system.
Constraints on the CAN bus:
- Greater Cost and Complexity: Because of its advanced features and higher data rate than other communication protocols, CAN bus implementation is more costly and difficult than other protocols.
- Restricted Range: The 500-meter maximum range of the CAN bus may limit its applicability in scenarios where devices are dispersed widely.
- Limited Power Delivery: Devices must have their power source because the CAN bus does not deliver electricity to linked devices.
CAN bus applications be included?
- Automotive: The CAN bus is frequently utilized for diagnostics, engine control, and vehicle communication in automotive applications.
- Aircraft: In aircraft applications, the Control and Navigation (CAN) bus facilitates communication between avionics systems, including control, guidance, and navigation systems.
- Industrial Automation: Sensors, actuators, and controllers communicate with one another via the CAN bus in industrial automation and control systems.
- Medical Devices: To communicate amongst devices like ventilators, infusion pumps, and patient monitoring, the CAN bus is utilized in medical devices.
- Railway Systems: Signalling, traction, and braking systems are just a few of the control systems that railway systems employ CAN buses to communicate with one another.
| Feature | CAN Bus | RS485 |
| Communication Method | Bus-Based | Point-to-Point |
| Speed and Bandwidth | High Speed (up to 1Mbps) | Lower Speed (up to 10Mbps) |
| Distance and Topology | Shorter Distance (up to 40m) and Star or Daisy Chain Topology | Longer Distance (up to 1200m) and Daisy Chain Topology |
| Fault Tolerance and Reliability | High Fault Tolerance and Reliability | Moderate Fault Tolerance and Reliability |
| Cost and Complexity | Higher Cost and Complexity | Lower Cost and Simpler |
| Applications | Distributed Control Systems, Automotive, Aerospace | Industrial Automation and Control Systems |
Explain the RS485 Protocol.
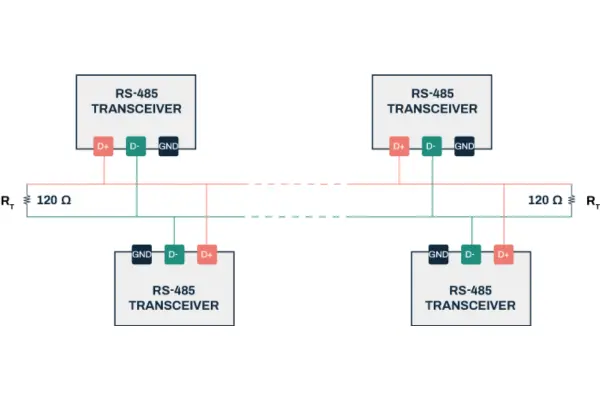
Two devices can connect across a great distance using the point-to-point RS485 protocol. Sensors, actuators, controllers, and other devices are connected via RS485 in industrial automation and control systems. RS485 is noted for its ruggedness, long-distance communication capabilities, and noise immunity.
Due to the differential signal used by the RS485 protocol, the communication line is made up of two wires with opposing voltages. As a result, RS485 can function across extended distances of up to 1200 meters. RS485 also employs a master-slave communication paradigm, where one device acts as the master and initiates communication with one or more slave devices.
Both the CAN Bus VS RS 485 protocols are extensively employed in automation and industrial settings. The particular needs of the application determine which protocol is best, even though each has pros and cons of its own. While RS485 is best for long-distance communication between two devices, CAN is best for real-time communication between several devices. When choosing the best communication protocol for their application, engineers can make well-informed choices if they are aware of the distinctions between these two protocols.
Benefits of RS485:
- Long-Distance Communication: RS485 is perfect for industrial and automation applications where devices may be dispersed over a wide region because it can carry data over long distances of up to 1200 meters.
- Multi-Point Communication: The RS485 protocol facilitates multi-point communication, enabling numerous devices to share a communication connection and facilitating effective device-to-device communication.
- Noise Immunity: Noise immunity is the ability of RS485 to transmit data reliably over noisy settings by utilizing differential signaling, which lessens the effect of noise and interference on the communication line.
- Minimal Cost: The straightforward cabling and inexpensive component cost of RS485 make it an affordable option for automation and industrial applications.
- Simple to implement: RS485 is a common option for basic industrial and automation applications since it is simple to implement and doesn’t require complicated hardware or software.
Restrictions on RS485:
- Reduced Data Rate: When compared to other communication protocols, RS485 has a lower data rate, which makes it less suitable for applications requiring high-speed data transfer.
- Restricted Bandwidth: The quantity of data that may be sent over the communication line may be limited due to RS485’s limited bandwidth.
- Half-Duplex Communication: Only half-duplex communication is supported by RS485 devices, which implies that data cannot be sent and received simultaneously, possibly slowing down the connection.
- Limited Power Delivery: Since RS485 cannot deliver power to linked devices, each device needs to have its power source.
The uses of RS485:
- Industrial Automation: RS485 is frequently utilized in control systems and industrial automation, allowing sensors, actuators, and controllers to be connected.
- Building Automation: Lighting, HVAC systems, and other building operations can be controlled by RS485 systems.
- Security Systems: Access control systems, security cameras, and other security-related equipment can be connected via RS485 in security systems.
- Transportation: RS485 is used to manage and monitor equipment including ticket machines, information displays, and passenger information systems in transportation systems like trains, subways, and airports.
- Energy Management: To monitor and regulate the amount of energy consumed in factories, buildings, and other facilities, RS485 can be included in energy management systems.
A comparison of CAN Bus VS RS 485
The communication method, speed and bandwidth, topology and distance, fault tolerance and dependability, cost and complexity, and applications are where CAN Bus VS RS 485 diverge most.
RS485 employs point-to-point communication, whereas CAN uses bus-based communication. While RS485 can accommodate more nodes on a single communication connection and operate over longer distances than CAN, CAN offers superior speed and bandwidth. Although CAN is more complex and costly to implement than RS485; it is also more fault-tolerant and reliable. Industrial automation and control systems often use RS485 while distributed control systems typically use CAN.
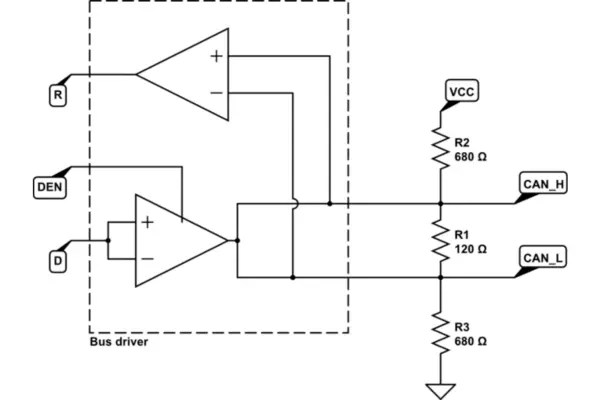
Physical Layer: The data that is carried over a CAN bus is represented by the voltage difference between two wires, which is a differential signal. In contrast, RS485 employs a balanced signal in which the information is sent as a voltage differential between two wires.
Maximum Cable Length: The maximum cable length supported by the CAN bus is 500 meters, however, the maximum cable length supported by RS485 is 1200 meters.
Data Transfer Rate: While RS485 allows up to 10 Mbps, CAN bus offers a greater 1 Mbps data transfer rate.
Network Topology: The bus topology used by the CAN bus connects several nodes to a single bus. Both bus and star topologies—in which several nodes are connected in a star configuration or a daisy chain—can be used with RS485 technology.
Error Handling: The CAN bus is more dependable than RS485 because it incorporates built-in error detection and correction techniques. Although error detection and correction are not built into RS485 itself, they can be accomplished with the use of extra hardware or software.
Cost: Because CAN bus requires specific hardware and software to deploy, it is typically more expensive than RS485 in general.
Conclusion:
In conclusion, each protocol has benefits and drawbacks, and the decision you make over which to use will rely on the particular needs of your application. CAN bus can be a preferable option if you require a real-time, high-speed communication protocol for an automotive or robotics application. RS485 can be a preferable option if you require a strong and dependable protocol for building automation or industrial automation. When choosing the best communication protocol for their application, engineers can make well-informed choices if they are aware of the distinctions between these two protocols.