

Introduction to Software-Defined Vehicles
The term “Software-Defined Vehicles” (SDV) refers to a vehicle in which software controls the behavior, evolution, and enhancement of the system over time. The Change Is Real: Automobiles Are Turning Into Software Platforms. You’ve probably seen the change if you’ve been in automobile engineering long enough. In the past, cars were mechanical systems with a few electronics added on top. Then electronics took over. Right now? Control is being taken over by software. SDVs rely on intelligent orchestration, centralized control, and OTA-enabled improvements rather than introducing a new ECU each time a new feature is required. This isn’t theory at Dorleco. It is based on an organized SDV engineering architecture that creates scalable EV platforms by combining embedded intelligence with automotive-grade hardware.What Is a Software-Defined Vehicle?
A vehicle architecture known as a Software-Defined Vehicle (SDV) enables features to be upgraded over-the-air without requiring new hardware, because centralized software intelligently manages key systems. Specifically, it coordinates powertrain functions, optimizes energy management, controls communication networks, and oversees diagnostics. As a result, vehicles become more scalable, adaptable, and future-ready throughout their lifecycle.The Reasons Behind OEMs’ Transition to SDV Architecture
Traditional distributed electronic architectures are becoming overly complicated, let’s face it.- Numerous ECUs
- Redundant wiring
- Slow implementation of features
- Scalability issues
- Electronic systems that are centralized
- Consolidation of domain controllers
- Software updates enabled by OTA
- Vehicle intelligence based on data
- Control optimization with an emphasis on EVs
From Hardware-Centric Vehicles to Intelligent Platforms
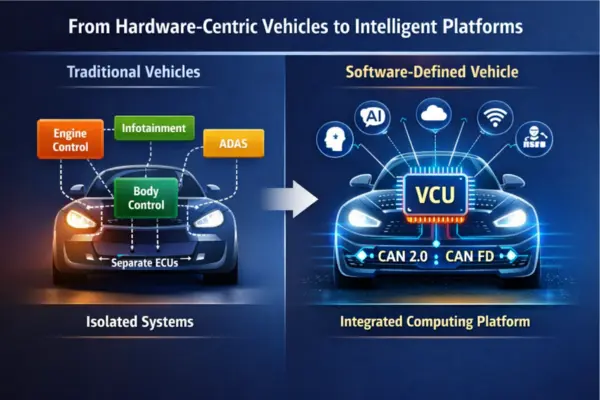 In traditional vehicles, each subsystem operates semi-independently. In a Software-Defined Vehicle:
In traditional vehicles, each subsystem operates semi-independently. In a Software-Defined Vehicle: - The architecture is centralized.
- Intelligence sits at the core.
- The Vehicle Control Unit (VCU) orchestrates behavior.
- Communication networks like CAN 2.0 and CAN FD become strategic infrastructure
The Dorleco Software-Defined Vehicles Framework™—Explained Simply
 SDV engineering into four logical layers.
SDV engineering into four logical layers. Layer 1: Application Intelligence
Real car behavior can be found here:- Driving modes
- Control of torque
- Optimization of energy
- Logic for regenerative braking
- Analytical and diagnostic
Layer 2: Control & Orchestration
As a result, the Vehicle Control Unit (VCU) acts as the master controller:- Powertrain coordination
- Safety logic integration
- Functional safety-ready architecture
- Multi-domain arbitration
Layer 3: Communication Backbone
In this architecture, no SDV operates without robust and reliable communication.- CAN 2.0
- CAN FD
- Gateway logic
- VCU integration
- Diagnostic protocols
Layer 4: Hardware Abstraction
Above all else, hardware should empower software—not limit its potential. Dorleco integrates:- Automotive-grade VCUs
- CAN Displays
- CAN Keypads
- Power electronics interfaces
Centralized Vehicle Intelligence Architecture
In Dorleco’s centralized control model, the Vehicle Control Unit (VCU) acts as the master orchestrator of the entire vehicle system. Instead of multiple disconnected ECUs making isolated decisions, the VCU coordinates all critical subsystems through a unified intelligence layer.
The VCU connects directly to:
-
Battery Management System (BMS): Monitors battery health, state of charge, and temperature and ensures safe energy management.
-
Motor Controller: Regulates torque output, speed control, and overall drive performance.
-
Charging System: Manages AC/DC charging operations and optimizes fast-charging efficiency.
-
HMI & Displays: Delivers real-time vehicle data and system status to the driver interface.
-
Telematics: Enables remote diagnostics, data communication, and OTA software updates.
-
Auxiliary ECUs: Integrates and coordinates secondary vehicle systems within the centralized control architecture.
- Consequently, this significantly reduces hardware complexity while enabling scalable software deployment.
-
Core SDV Engineering Capabilities
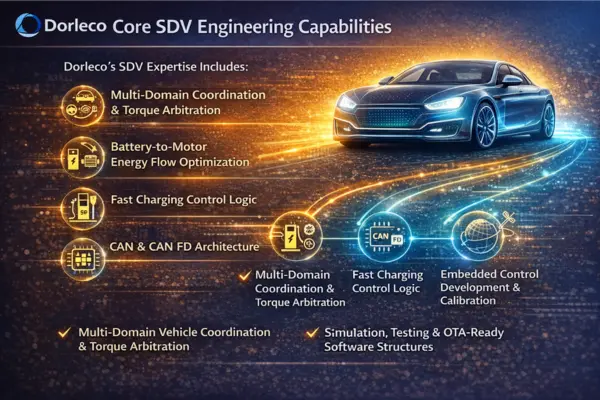 As a result, Dorleco’s SDV expertise includes:
As a result, Dorleco’s SDV expertise includes: - Multi-domain vehicle coordination & torque arbitration
- Battery-to-motor energy flow optimization
- Fast charging control logic
- CAN & CAN FD communication architecture design
- Embedded control development and calibration
- Simulation, testing & OTA-ready software structures
Benefits of Software-Defined Vehicles Architecture
- Faster Feature Deployment
OTA updates reduce dependency on physical recalls.
- Reduced ECU Count
Domain consolidation simplifies vehicle wiring.
- Scalable Platform Reuse
One architecture can support multiple vehicle programs.
- Improved Energy Efficiency
Optimized torque arbitration improves range.
- Faster Time-to-Market
Software modularity accelerates iteration cycles
How do software-defined vehicles improve electric vehicle performance?
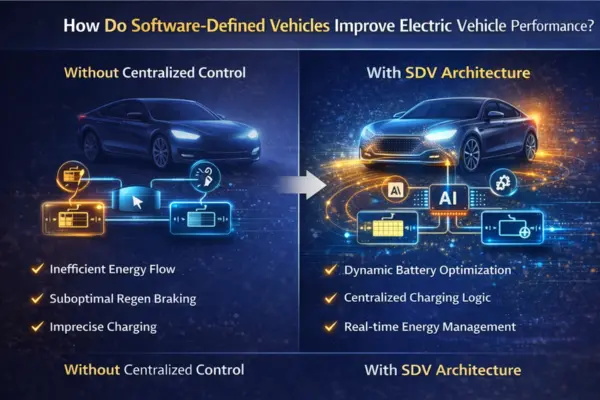 Against this backdrop of rapid mobility transformation, electric vehicles now depend more than ever on software intelligence. Without centralized control:
Against this backdrop of rapid mobility transformation, electric vehicles now depend more than ever on software intelligence. Without centralized control: - Energy flow becomes inefficient
- Regenerative braking may be suboptimal
- Charging coordination lacks precision
- Battery-to-motor optimization becomes dynamic
- Fast charging logic is controlled centrally
- Energy management adapts in real time
Final Thoughts
Rather, software-defined vehicles are not a temporary trend but a long-term transformation. More importantly, they represent a structural shift in how vehicles are fundamentally designed, validated, and continuously updated. For OEMs and Tier-1 suppliers building next-generation electric platforms, centralized SDV architecture offers:- Control
- Scalability
- Efficiency
- Future readiness